

-
摘要:
深海自主/遥控式水下机器人(ARV)作为新兴的复合型水下机器人,融合了自主式水下机器人的灵活性和遥控式水下机器人的人机交互性等优势,开启了自主与遥控混合作业的新模式。深海ARV可切换为AUV自主航行模式,独立采集周边区域近海底地形地貌、地质结构以及环境参数等数据,也能下潜至目标区域后切换为ROV遥控模式进行局部观察和采样操作,其探测作业一体化技术代表了具备复杂使命执行力的第三代深海水下机器人的发展方向。通过分析国内外深海混合型水下机器人的发展现状,结合ARV在中国深海矿产资源调查中的主要应用案例和取得的成果,以6000米级 “问海一号”ARV系统的研发为例,给出其关键技术集成以及面对的技术挑战,并对未来深海ARV的应用场景、功能集成和发展方向提出了一些设想和建议。
-
关键词:
- 自主/遥控式水下机器人(ARV) /
- AUV自主航行 /
- ROV遥控 /
- 深海矿产资源调查 /
- “问海一号”ARV系统
Abstract:Deep-sea autonomous/remote-operated underwater vehicle (ARV) as an emerging hybrid underwater device, it combines the advantages of the flexibility of autonomous underwater vehicle (AUV) and the human-computer interaction of remotely operated vehicle (ROV), promoting a new model of hybrid autonomous and remote-controlled operations. The deep-sea ARV can be switched to AUV autonomous navigation mode to independently collect data of near-seabed topography, geological structure, and environmental parameters of the surrounding area. It can also be switched to ROV mode for local observation and sampling, depending on the target area of interest, showing future development direction of third-generation deep-sea underwater vehicles with complex mission execution capabilities. The development status of hybrid deep-sea ARV at home and abroad is reviewed. Aiming at deep-sea mineral resources investigation in China, the research and development of the 6 000-m Wenhai 1 ARV system is introduced, along with its key technology and technical challenges, and its main application cases and achievements. At last, some ideas and suggestions on future application scenarios, functional integration, and development directions for deep-sea ARV are presented.
-

-

图 1 美国WHOI “海神”号ARV (a)、日本JAMSTEC“MR-X1”号ARV(b)、法国“阿丽亚娜”号HROV (c)以及瑞典SAAB研制的“Seaeye Sabertooth”HROV(d)
Figure 1.
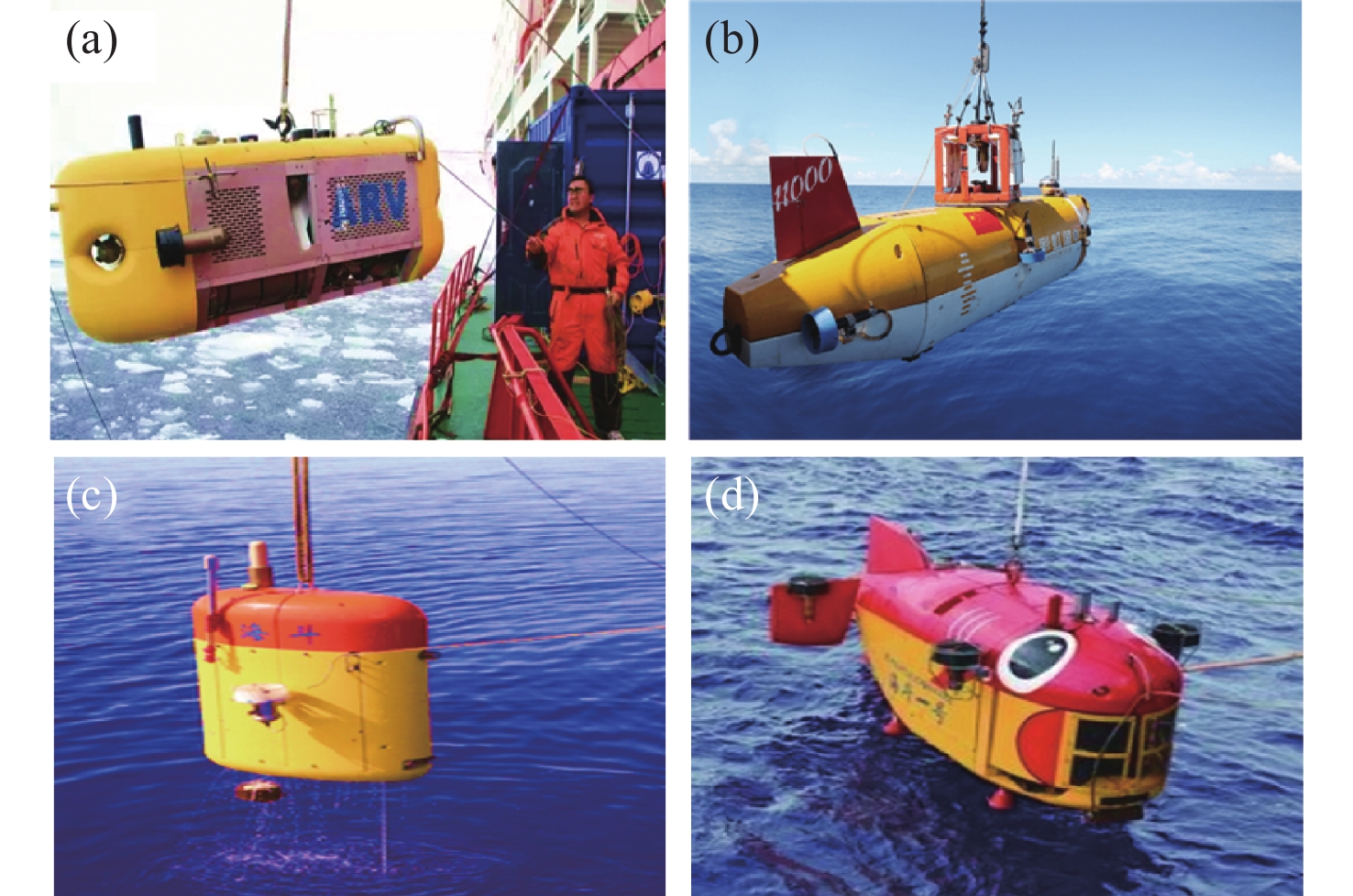
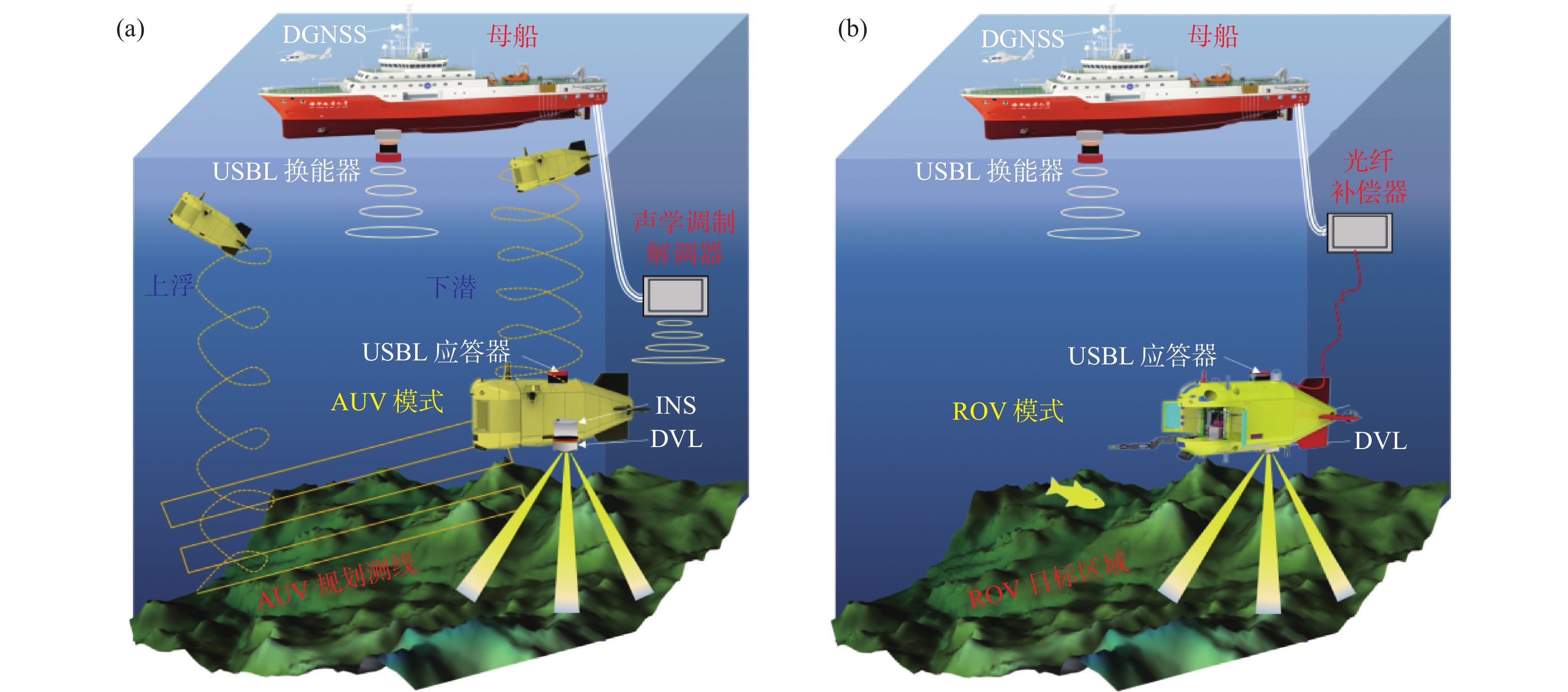
图 2 沈阳自动化研究所的“北极”号ARV(a)、上海彩虹鱼公司的“彩虹鱼”ARV(b)、沈阳自动化研究所的“海斗”号(c)以及“海斗一号”ARV(d)
Figure 2.
-
[1] 封锡盛,李一平,徐会希,等. 深海自主水下机器人发展及其在资源调查中的应用[J]. 中国有色金属学报,2021,31(10):2746-2756.
[2] 吴有生,赵羿羽,郎舒妍,等. 智能无人潜水器技术发展研究[J]. 中国工程科学,2020,22(6):26-31.
[3] 李硕,唐元贵,黄琰,等. 深海技术装备研制现状与展望[J]. 中国科学院院刊,2016,31(12):1316-1325. doi: 10.16418/j.issn.1000-3045.2016.12.005
[4] 任玉刚,刘保华,丁忠军,等. 载人潜水器发展现状及趋势[J]. 海洋技术学报,2018,37(2):114-122.
[5] 徐伟哲,张庆勇. 全海深潜水器的技术现状和发展综述[J]. 中国造船,2016,57(2):206-221. doi: 10.3969/j.issn.1000-4882.2016.02.023
[6] 陈宗恒,田烈余,胡波,等. “海马”号ROV在天然气水合物勘查中的应用[J]. 海洋技术学报,2018,37(2):24-29.
[7] 沈克,严允,晏红文. 我国深海作业级ROV技术现状及发展展望[J]. 控制与信息技术,2020,3:1-7.
[8] 李硕,刘健,徐会希,等. 我国深海自主水下机器人的研究现状[J]. 中国科学:信息科学,2018,48(9):1152-1164.
[9] 王振杰,刘慧敏,杨慧良,等. 基于垂直约束的深海拖曳系统USBL/DVL组合导航算法[J]. 中国惯性技术学报,2019,27(5):670-676. doi: 10.13695/j.cnki.12-1222/o3.2019.05.016
[10] YU C Y,XIANG X B,MAURELLI F,et al. Onboard system of hybrid underwater robotic vehicles:integrated software architecture and control algorithm[J]. Ocean Engineering,2019,187:106121. doi: 10.1016/j.oceaneng.2019.106121
[11] WANG B,WU C,GE T. Self-repairing control system for a hybrid underwater vehicle[J]. Advanced Materials Research,2014,834/836:1256-1262.
[12] 徐鹏飞. 11 000米ARV总体设计与关键技术研究[D]. 北京: 中国舰船研究院, 2014.
[13] 陆洋,唐元贵,王健,等. 全海深ARV浮力配平计算方法[J]. 机器人,2021,43(1):74-80. doi: 10.13973/j.cnki.robot.200037
[14] 杨新平. 遥控自治水下机器人控制技术研究[D]. 北京: 中国舰船研究院, 2012.
[15] XIANG X B,ZUO M J,LAPIERRE L,et al. Hybrid underwater robotic vehicles:the state-of-the-art and future trends[J]. Hkie Transactions,2015,22(2):103-116. doi: 10.1080/1023697X.2015.1038322
[16] 王磊,刘涛,杨申申,等. 深海潜水器ARV关键技术[J]. 火力与指挥控制,2010,35(11):6-8. doi: 10.3969/j.issn.1002-0640.2010.11.002
[17] 李一平,李硕,张艾群. 自主/遥控水下机器人研究现状[J]. 工程研究-跨学科视野中的工程,2016,8(2):217-222.
[18] MOMMA H, WATANABE M, HASHIMOTO K, et al. Loss of the full ocean depth ROV Kaiko-part 1: ROV Kaiko-a review[C]//The Fourteenth International Offshore and Polar Engineering Conference, Yokosuka: International Society of Offshore and Polar Engineers, 2004.
[19] BOWEN A D,YOERGER D R,TAYLOR C,et al. The Nereus hybrid underwater robotic vehicle[J]. Underwater Technology,2009,28(3):79-89. doi: 10.3723/ut.28.079
[20] 李硕,曾俊宝,王越超. 自治/遥控水下机器人北极冰下导航[J]. 机器人,2011,33(4):509-512.
[21] 唐元贵,王健,陆洋,等. “海斗号”全海深自主遥控水下机器人参数化设计方法与试验研究[J]. 机器人,2019,41(6):697-705. doi: 10.13973/j.cnki.robot.180684
[22] 吴立新,荆钊,陈显尧,等. 我国海洋科学发展现状与未来展望[J]. 地学前缘,2022,29(5):1-12. doi: 10.13745/j.esf.sf.2022.4.60
[23] 吴立新,陈朝晖,林霄沛,等. “透明海洋”立体观测网构建[J]. 科学通报,2020,65(25):2654-2661.
[24] LI J,JUN B,LEE P,et al. A Hierarchical real-time control architecture for a semi-autonomous underwater vehicle[J]. Ocean Engineering,2005,32(13):1631-1641. doi: 10.1016/j.oceaneng.2004.12.003
[25] CUI W C,WANG F,PAN B B,et al. Issues to be solved in the design,manufacture and maintenance of full ocean depth manned cabin[J]. Advances in Chemical Engineering and Science,2016,11:1-29.
[26] SAHOO A,DWIVEDY S K,ROBI P S. Advancements in the field of autonomous underwater vehicle[J]. Ocean Engineering,2019,181:145-160. doi: 10.1016/j.oceaneng.2019.04.011
[27] FERREIRA C Z,CARDOSO R,MEZA M,et al. Controlling tracking trajectory of a robotic vehicle for inspection of underwater structures[J]. Ocean Engineering,2018,149(2):373-382.
[28] 孙大军,郑翠娥,张居成,等. 水声定位导航技术的发展与展望[J]. 中国科学院院刊,2019,34(3):331-338. doi: 10.16418/j.issn.1000-3045.2019.03.011
[29] 郑冰,孙骁禾,粟京. 一种水下激光成像的新方法[J]. 中国海洋大学学报(自然科学版),2006,36(1):119-122.
[30] 张鑫. 深海环境及深海沉积物拉曼光谱原位定量探测技术研究[D]. 青岛: 中国海洋大学, 2009.
[31] 王冰,宋永东,杜增丰,等. 水下激光扫描成像系统及其在冷泉研究中的应用[J]. 海洋地质前沿,2019,35(11):60-65. doi: 10.16028/j.1009-2722.2019.11009
[32] 潘国伟,曹聚亮,吴美平,等. 水下重力测量技术进展[J]. 测绘通报,2019,2:1-5. doi: 10.13474/j.cnki.11-2246.2019.0033
-
 下载:
下载:





图(12)
计量
- 文章访问数: 2344
- PDF下载数: 142
- 施引文献: 0